
天车仿真模型参数标定方法:从实测数据反推运动学、动力学与FEA参数
前两篇分别讲了数字孪生总体架构和AAS数据模型,这篇来聊仿真。
数字孪生和普通3D监控最大的区别在于”能算”。但算得准不准,不取决于仿真软件有多贵,而取决于模型参数标定有多细。同一个天车模型,参数标好了仿真误差<5%,参数乱填可能差出50%。我们做过对比测试——同一台天车用标定后的模型仿真误差<5%,用出厂默认参数误差接近40%,差距非常大。
这篇就把天车仿真模型的参数标定方法拆开讲——运动学、动力学、FEA、刚柔耦合,每个类型怎么标、用什么工具、收敛判据是什么。
| 标定参数 | 实测手段 | 标定方法 | 典型误差源 | 收敛判据 |
|---|---|---|---|---|
| 大车定位精度 | 激光跟踪仪 | 多点实测vs编码器拟合 | 车轮打滑、轨道不平 | ±10 mm |
| 小车定位精度 | 激光测距仪 | 同大车方法 | 齿轮间隙、制动偏差 | ±5 mm |
| 起升高度精度 | 编码器+激光 | 钢丝绳倍率系数校准 | 绳弹性伸长、卷筒误差 | ±20mm |
| 关节动态跟随 | 高速摄像/IMU | 阶跃响应→传递函数 | 加减速时间、PID参数 | 位置误差<5% |
一、仿真标定的基本逻辑
仿真标定说白了就是一件事:让仿真模型的输出和物理世界的实测数据对得上。
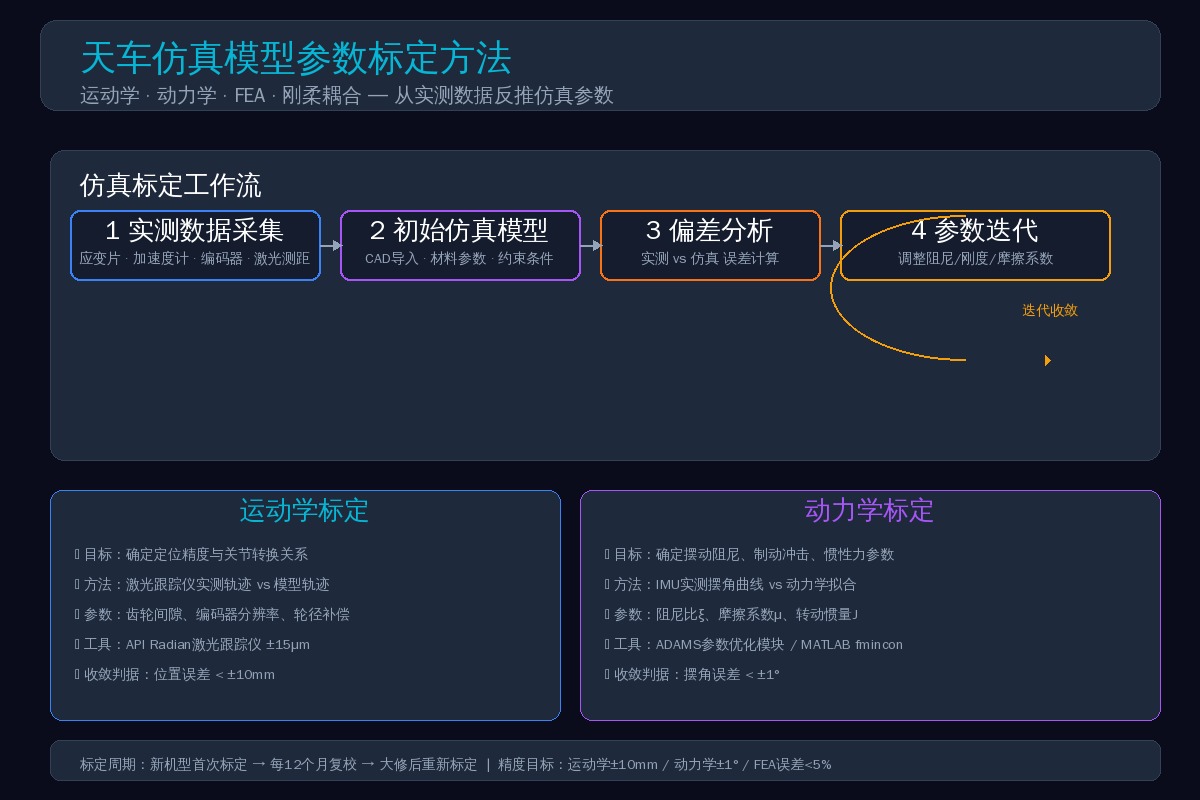
标准流程四步走:
- 实测数据采集:在天车关键位置布置传感器,获取真实的运动/力学数据作为基准
- 初始仿真模型:基于CAD设计和材料参数建立初始模型跑一遍
- 偏差分析:把仿真输出和实测数据叠在一起看,计算误差
- 参数迭代:调整模型中的可调参数(摩擦系数、阻尼比、刚度系数等),直到误差进入可接受范围
标定不是一次性的。新机型首次标定、每12个月复校、大修后重新标定,这是基本节奏。
二、运动学模型标定
运动学标定解决的是”模型里的天车动得准不准”的问题。主要标定参数
| 参数 | 物理意义 | 标定方法 | 典型初值 | 标定后范围 |
|---|---|---|---|---|
| 阻尼比ξ | 钢丝绳摆动衰减 | 自由衰减→对数衰减率 | 0.01~0.05 | 0.015~0.035 |
| 摩擦系数μ | 车轮/轨道滚动摩擦 | 空载滑行距离测试 | 0.01~0.03 | 0.015~0.025 |
| 转动惯量J | 电机+联轴器+卷筒 | CAD初值+加减速修正 | 按CAD | CAD×1.05~1.15 |
| 刚度系数k | 钢丝绳拉伸刚度 | 静载→力-位移拟合 | EA/L | 理论值×0.85~0.95 |
| 制动器响应 | 制动信号到抱闸到位 | 高速摄像+电流钳 | 厂家手册 | 实测值±15% |
包括:
工具推荐:API Radian激光跟踪仪(精度±15μm/m)、FARO Focus激光扫描仪。如果预算有限,也可以用高精度RTK-GNSS+IMU组合方案,精度稍低但成本只有激光跟踪仪的1/5。
三、动力学模型标定
动力学标定是仿真中最关键也最难的一步。它决定了制动距离算得准不准、钢丝绳摆角对不对、结构冲击力是否真实。
3.1 主要标定参数
动力学标定的核心参数包括:钢丝绳阻尼比ξ、风阻系数Cd、摩擦副阻尼c、加减速时间常数τ和起升动态系数φ。这些参数直接决定了天车在启停、变速、制动过程中的动态响应是否准确,也影响制动距离、吊物摆角、结构冲击力等关键仿真指标。
其中钢丝绳阻尼比ξ是最敏感的参数——误差0.01就能让摆角预测差出3~5°,也是标定工作量最大的项目。风阻系数Cd在室内天车可取0.8~1.0,露天天车需根据实测风速修正到1.2~1.5。加减速时间常数τ直接影响启停冲击力,需要从变频器参数和实测电流曲线联合标定。
3.2 摆动参数标定——具体操作方法
钢丝绳摆动是天车动力学仿真中最关键也最容易出问题的地方。具体标定步骤如下:
- 将天车吊起额定载荷的50%~100%,吊物离地约1米
- 给定一个短脉冲的大车移动指令(急停),使吊物产生自由摆动
- 在吊钩正下方布置高速摄像机(240fps以上),录制摆动过程
- 从视频中提取吊物在X/Y方向的摆角时程曲线
- 用对数衰减率法计算阻尼比:ξ = (1/(2πn)) × ln(θ₁/θₙ₊₁),其中θ₁是第一个周期的摆角,θₙ₊₁是第n+1个周期的摆角
- 将实测阻尼比代入动力学模型,重新仿真同工况,对比摆角曲线
- 调整模型中的风阻系数和摩擦副阻尼直到仿真与实测的摆角峰值误差<±1°
一般来说,钢丝绳阻尼比ξ在0.015~0.035之间。低于0.015说明模型太”滑”,高于0.035说明阻尼假设偏大。
四、FEA有限元模型标定
4.1 静态标定
FEA模型标定的核心是让仿真应力云图和实测应变数据对得上。具体做法:
- 在主梁关键截面粘贴应变片(跨中下翼缘板、端梁连接处、焊缝区)
- 分级加载:空载→25%→50%→75%→100%→125%额定载荷
- 每级载荷稳定后记录应变片读数,换算成应力值
- 在FEA模型中施加相同载荷,提取对应节点的仿真应力值
- 计算相对误差:(仿真应力 – 实测应力) / 实测应力 × 100%
- 如果误差>10%,检查边界条件(约束是否正确)、网格密度(焊缝区是否加密)、材料参数(E和ν是否准确)
4.2 模态标定
动力学仿真需要准确的模态参数。方法:
- 在主梁上布置5~8个加速度传感器
- 用力锤敲击激励或利用天车启停的瞬态激励
- 采集振动信号→FFT变换→获取前10阶固有频率和振型
- 对比FEA模态分析结果,主要关注1阶垂弯频率(A6/A7级天车要求≥2Hz)
- 如果偏差>5%,调整FEA模型中的质量分布或边界刚度
五、刚柔耦合标定
天车仿真中最大的坑——钢丝绳。它既是柔性体(拉伸、弯曲、扭转),又连接着刚性吊物,用纯刚体模型算出来完全不靠谱,用纯柔性体算又太慢。工程上采用离散化绳索模型:将钢丝绳离散为N段刚体+弹簧阻尼连接。
关键的标定参数:
- 离散段数N:N越大仿真越准但也越慢。经验值:起升高度≤16m取N=20,高度>16m取N=30
- 绳索刚度k:理论值k=EA/L,但实际钢丝绳因为绞合结构,弹性模量比钢材本体低15%~20%,标定后取理论值的0.85
- 绳索阻尼c:与钢丝绳润滑状态和编织方式有关。实测自由衰减曲线拟合,典型值c=0.5~2.0 N·s/mm
- 滑轮接触摩擦:钢丝绳在卷筒上缠绕时存在摩擦滞后,标定后取μ=0.08~0.12
六、标定工具与流程汇总
不同类型标定的工具、周期、精度目标和难度对比如下:
| 标定类型 | 主要工具 | 标定周期 | 精度目标 | 难度 |
|---|---|---|---|---|
| 运动学 | 激光跟踪仪/编码器 | 首次+每年 | ±10 mm | ⭐⭐ |
| 动力学 | IMU/高速摄像/电流钳 | 首次+每年+大修后 | 摆角±1° | ⭐⭐⭐ |
| FEA静态 | 应变片/数据采集仪 | 首次 | 应力误差<10% | ⭐⭐⭐ |
| FEA模态 | 加速度计/力锤/FFT | 首次+大修后 | 频率偏差<5% | ⭐⭐⭐ |
| 刚柔耦合 | 高速摄像+RecurDyn | 首次 | 绳索力误差<8% | ⭐⭐⭐⭐ |
七、常见标定陷阱
- 材料参数照搬手册:Q355B的弹性模量手册上是206GPa,但实际钢板的轧制方向差异可能导致各向异性,偏差最大可达5%。重要项目建议取样做拉伸试验
- 约束条件过于理想化:端梁底部”固定约束”在FEA里是最常见的偷懒写法。实际上轨道是有弹性的,轨道梁也会变形。正确的做法是用弹簧-阻尼约束代替刚性固定约束,弹簧刚度取轨道支撑刚度的实测值
- 网格不够密:一个50万网格的模型和一个5万网格的模型,焊缝区的最大应力可能差30%。如果关注局部应力,网格必须加密到10mm以下
- 只标一个工况:只标额定载荷容易过拟合。建议至少标定3个工况(空载、50%额定、100%额定),确保模型在全部工作范围内都准
结语
仿真模型参数标定是数字孪生从”好看”到”好用”的关键一步。参数不标的仿真,充其量是个3D动画。参数标好了,才是真正的数字孪生。
随后写了《边缘端实时渲染优化方案》,把WebGL渲染优化、模型减面策略、数据压缩传输讲清楚。敬请关注。
Perguntas frequentes
问:仿真标定需要什么传感器和设备?
运动学标定需要激光跟踪仪(精度±15μm/m),也可以用RTK-GNSS+IMU替代,成本只有激光跟踪仪的1/5。动力学标定需要高速摄像机(240fps以上)和加速度传感器。FEA静态标定需要应变片和数据采集仪。全套设备投入约8~15万元。
问:标定一次需要多长时间?
首次完整标定(运动学+动力学+FEA)约2~3个工作日。其中FEA静态标定需要分级加载测试,耗时最长。年度复校仅需半天,主要在验证关键参数没有漂移。大修后重新标定约1个工作日。
问:不标定直接用仿真模型会怎样?
我们做过对比测试——同一台天车用标定后的模型仿真误差<5%,用出厂默认参数误差接近40%。特别是在制动距离计算和钢丝绳摆角预测上,未标定的模型基本不可信。仿真不标定,充其量是个3D动画。
